Hướng dẫn sử dụng flycam phục vụ theo dõi, giám sát rừng
Tài liệu hướng dẫn điều khiển flycam này bản quyền thuộc Dự án SNRM/JICA. Chi tiết quý vị có thể tải về tài liệu bản gốc tại đường link ở cuối trang. Chúng tôi sử dụng thông tin trong tài liệu này nhằm chia sẻ rộng rãi đến quý vị tài liệu quý này nhằm giúp quý vị có thêm các tham khảo về sử dụng flycam phục vụ theo dõi, giám sát rừng.
Quý vị cũng có thể xem thêm bài viết giới thiệu chung về ứng dụng của Flycam tại đây.
Chương 1. Giới thiệu
Hợp phần đa dạng sinh học (Hợp phần 3) của Dự án Quản lý Tài nguyên Thiên nhiên Bền vững (sau đây gọi là “SNRM”) đã được Nhóm Dự án JICA triển khai thực hiện phối hợp với các bên liên quan ở tỉnh Lâm Đồng, đặc biệt là Ban Quản lý Vườn Quốc gia Bidoup – Núi Bà (BNBNPMB) và Ban quản lý rừng phòng hộ đầu nguồn Đa Nhim (DNWPFMB), kể từ tháng 8 năm 2015. Mục tiêu chính của Dự án là thiết lập một cơ chế quản lý hệ sinh thái toàn diện và có tính cộng tác trong Khu dự trữ sinh quyển thế giới Lang Biang (LB-BR) bằng cách i) áp dụng phương thức phối hợp và khuôn khổ quản lý đa ngành cho LB-BR, ii) nâng cấp/phát triển cơ chế quản lý rừng mang tính hợp tác dựa trên thỏa thuận hợp tác quản lý (CMA) trong vùng đệm và vùng lõi trong LB-BR và iii) sử dụng kết quả giám sát rừng và mối đa dạng sinh học cho công tác quản lý vùng lõi và vùng đệm của LB-BR.
Nhóm dự án JICA đã bắt đầu các hoạt động thử nghiệm theo CMA cập nhật tại các vị trí thí điểm, và một trong những yếu tố chính của bản CMA nâng cấp là cải thiện các hoạt động tuần tra rừng hiện tại của các thành viên trong nhóm tham gia vào hiệp ước bảo vệ rừng (nhóm PFES). Về việc này, thiết bị bay không người lái (Flycam) là một công cụ đầy hứa hẹn cho nhà quản lý rừng vì nó giúp cung cấp các hình ảnh trên không mới nhất và rất chi tiết để theo dõi trạng thái/tình trạng của rừng kịp thời và đồng thời giúp từng trạm kiểm lâm và từng nhóm PFES thực hiện tuần tra hiệu quả hơn.
Tuy nhiên, để đảm bảo cho hoạt động Flycam diễn ra an toàn, công tác huấn luyện nhân sự là điều cần thiết, do đó SNRM đã tổ chức một loạt các khóa đào tạo về vận hành và quản lý thiết bị bay không người lái (Flycam) cho các nhân viên của BNBNPMB và DNWPFMB trong giai đoạn 2017-2018.
Sách hướng dẫn toàn diện này bao gồm nhiều đề mục có liên quan đến vận hành và quản lý Flycam theo cách trực quan để người dùng dễ nắm bắt. Tài liệu hướng dẫn này dự kiến sẽ được sử dụng để nâng cao năng lực cho nhân viên phụ trách vận hành và quản lý Flycam trong nhiệm vụ bảo vệ và bảo tồn rừng của quốc gia.
Chương 2. Phạm vi hướng dẫn
2.1. Mục tiêu
Bản hướng dẫn sử dụng này cung cấp một loạt các chỉ dẫn về cách thức vận hành và quản lý Flycam cũng như sử dụng và quản lý dữ liệu cho các cán bộ phụ trách những nhiệm vụ trên. Cụ thể, bản hướng dẫn sử dụng này nhắm đến việc:
- Cung cấp thông tin cơ bản về Flycam (DJI Phantom 4 Pro)
- Cung cấp hướng dẫn về cách thiết kế kế hoạch bay
- Cung cấp hướng dẫn về cách vận hành Flycam bằng chế độ lái tự động và lái bằng tay
- Cung cấp hướng dẫn về cách xử lý hình ảnh thu nhận được từ Flycam và trích xuất dữ liệu để dễ dàng sử dụng
- Cung cấp hướng dẫn quản lý và bảo quản phù hợp cho các thiết bị đi kèm với Flycam
2.2. Cấu trúc tổng thể của Bản Hướng Dẫn Sử Dụng

Lưu ý rằng thông tin trong tài liệu này được cập nhật tính đến tháng 1 năm 2020 và có thể dịch vụ được đề cập trong sách hướng dẫn thay đổi/cập nhật theo mỗi công ty. Vui lòng kiểm tra thông tin mới nhấ’t như sau:
- DJI: https://www.dji.com/
- Pix4Dmapper: https://www.pix4d.com/product/pix4dmapper-photogrammetry-software
- Litchi: https://flylitchi.com/
Chương 3. Thông tin cơ bản của flycam
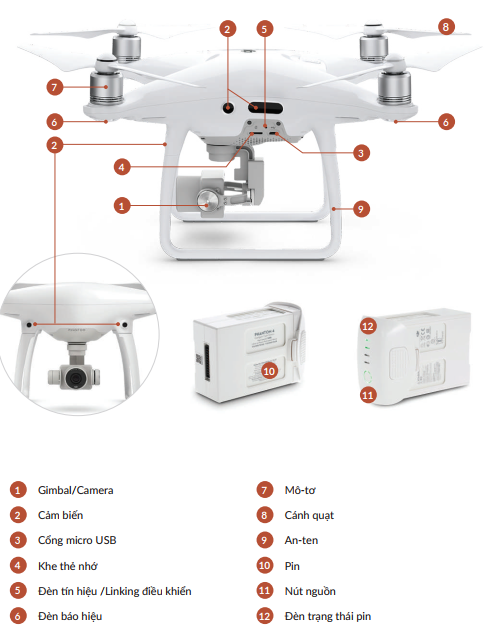
SNRM cung cấp thiết bị bay (DJI Phantom 4 Pro) cho BNBNPMB và DNWPFMB.
Các thông số kỹ thuật và tên các bộ phận bao gồm
3.1. Thông số kỹ thuật
Thông số cơ bản của DJI Phantom 4 Pro trong Bảng 3.1 như sau:
| Tên thiết bị | Phantom 4 Pro |
| Nhà sản xuất | DJI |
| Trọng lượng | 1.4 kg (tính gồm cả cánh và pin) |
| Tốc độ tối đa | 72 km/giờ (tối đa 54 km/h trong Chế độ lái tự động – Autopilot) |
| Thời gian bay | 27 phút (khuyến nghị 15 phút) |
| Phạm vi điều khiển | 7 km |
| Chiều cao | 500 m |
| Độ phân giải | 20 triệu Pixel |
| Pin | Lithium-ion (LiPo) 5,870 mAh / 89.2 Wh |
| Thời gian sạc | 75 – 90 phút (tùy thuộc vào dung lượng pin) |
| Bộ nhớ | Micro SD UHS Speed Class 3 (U3) |
| GPS | GPS & GLONASS |
3.2. Tên các bộ phận

Chương 4. Lập kế hoạch bay
4.1. Xác định khu vực khảo sát và điểm điều khiển
Để có một chuyến khảo sát bay an toàn và hiệu quả, người điều khiển thiết bị bay (và/hoặc nhân viên ở các trạm nếu có đủ năng lực) cần xác định 0) Khu vực khảo sát bay và 2) Vị trí điểm điều khiển (vị trí đứng của người điều khiển) chủ yếu bằng cách sử dụng Google Earth Pro.
Sau đây là các điểm cần được cân nhắc kỹ khi xác định khu vực khảo sát. Có thể phải kiểm tra hiện trường:
- Bảo đảm điểm điều khiển không quá xa khu vực khảo sát. Khoảng cách đề xuất từ điểm điều khiển đến điểm khảo sát xa nhất là trong vòng 3km
- Bảo đảm có điện tại điểm khảo sát để khảo sát bay liên tục. Nếu không có điện, cần xem xét kế hoạch điện dự phòng (ví dụ như vận chuyển an toàn để mang ắc-quy đến điểm sạc, mua ắc-quy dự phòng để sạc (khuyên dùng Anker PowerHouse 020.000mAh/ 400wh – A0700), v.v.)
- Bảo đảm không có vật cản cho hoạt động bay an toàn như từ trường, đường dây cao áp, v.v.
Các bước tiến hành xác định khu vực bay bằng Google Earth Pro:
- Tạo một folder để chứa dữ liệu khu vực khảo sát và điểm điều khiển
- Dùng công cụ Add Polygon để tạo lập khu vực cần khảo sát bên trong folder
- Dùng công cụ Add Placemark để tạo điểm điều khiển bên trong folder
- Lưu lại folder với định dạng kml

4.2. Chuẩn bị kế hoạch bay
Để đảm bảo an toàn cho hoạt động dùng Flycam, SNRM khuyến nghị áp dụng chế độ lái tự động với kế hoạch bay được thiết kế cẩn thận, sử dụng một ứng dụng có tên là Litchi. Có hai bước sẽ được đề xuất trong phần này: 1) Chuẩn bị kế hoạch bay trên ứng dụng GIS (Mapinfo/Google Earth) và xuất dữ liệu sang Litchi (2) Chuẩn bị kế hoạch bay trên Litchi (qua trình duyệt web).
Là điều kiện tiên quyết, cần lưu ý rằng các hình ảnh phải chồng lên nhau ít nhất 70-80% để phần mềm (Pix4D mapper) tạo ra một hình ảnh xử lý tích hợp. Việc xác định cự ly giữa 2 điểm chụp ảnh được tính toán dựa trên các công thức hình học như sau:

4.2.1. Chuẩn bị kế hoạch bay trên ứng dụng GIS (Mapinfo) và xuất dữ liệu sang Google Earth
Có thể lập kế hoạch bay trực tiếp trên Litchi (máy tính bảng (iPad) hoặc trình duyệt web). Tuy nhiên, sách hướng dẫn này đề xuất lập kế hoạch bay trong ứng dụng GIS như Mapinfo hoặc QGIS trước tiên, sau đó xuất dữ liệu sang Litchi để tiết kiệm thời gian và bảo đảm tính chính xác của kế hoạch. Mapinfo được sử dụng trong sách hướng dẫn này vì nhân viên kỹ thuật của BNBNPMB/DNWPFMB quen với công cụ này:
Bước 1: Tạo một lớp lưới vị trí bay có khoảng cách chiều ngang là 130m và chiều dọc là 100m giữa các điểm (Lớp lưới các điểm bay nên sao lưu thành 1 bản để có thể sử dụng nhiều lần).
Bước 2: Nhập tập tin định dạng “Google KML” tạo ở mục 4.1: vào File\Open Universal Data… hoặc Tools\Universal Translator để chuyển định dạng từ “Google KML” thành MapInfo TAB (Ngoài hai công cụ nêu trên, cũng khuyến nghị sử dụng tool BienTapBanDo của tác giả Phạm Xuân Đảm để việc chuyển định dạng dễ dàng hơn). Xem link tools tại đây
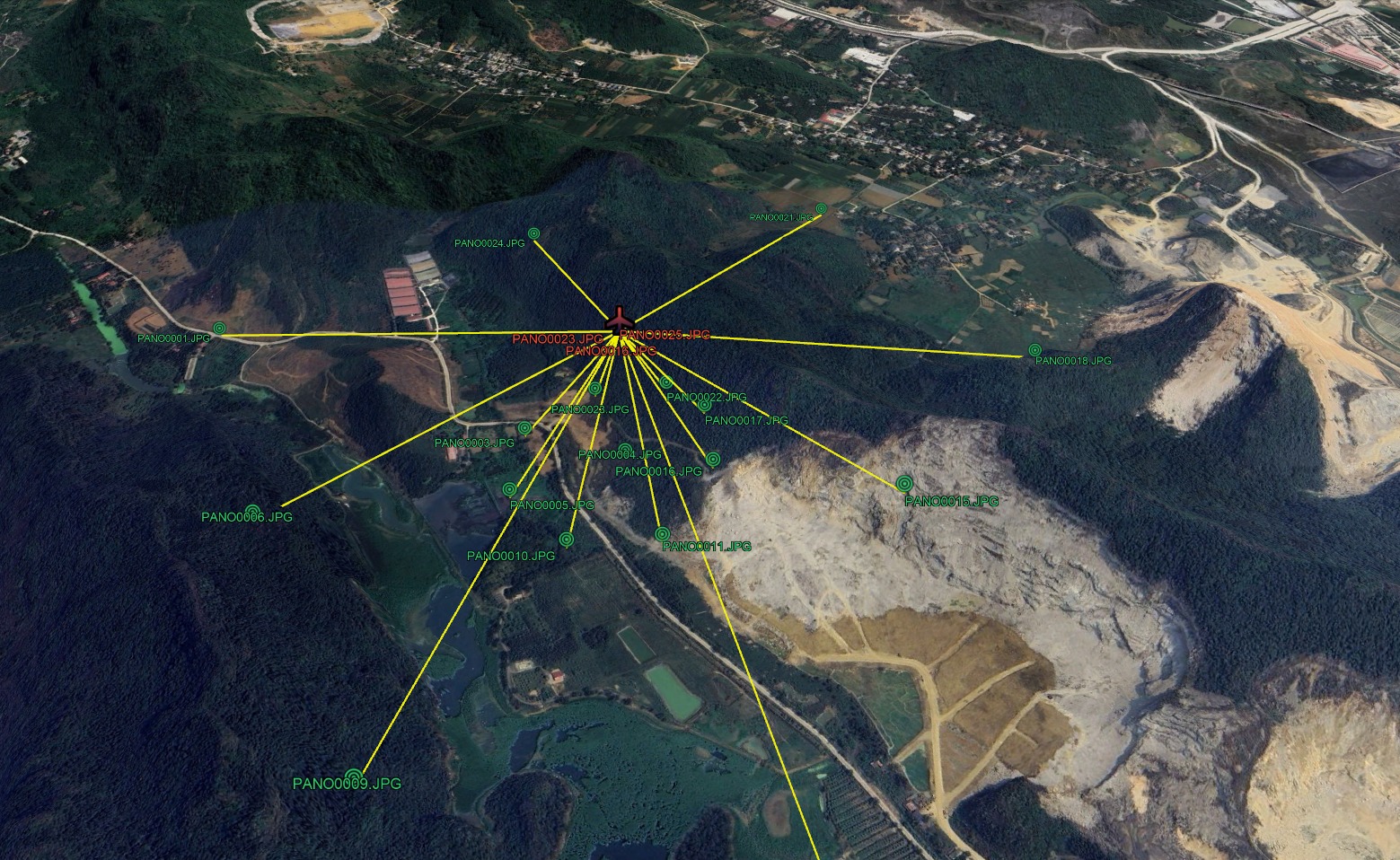
| Bước 3: Xác nhận lớp bổ sung trên khu vực cần khảo sát và điểm điều khiển, đồng thời xoá bỏ các điểm thừa bên ngoài khu vực cần khảo sát | Bước 4: Sử dụng công cụ Polyline để vẽ tuyến đường bay. Điểm đề xuất cho từng chuyến bay là từ 24 đến 30 điểm có xem xét điểm điểm bắt đầu (ngôi sao màu đỏ) (Các tuyến bay cần phải là khoảng cách bay tối ưu ngắn nhất, điểm xuất phát và kết thúc của kế hoạch bay gần điểm điều khiển nhất).
|
 |
 |
 |
Bước 5: Chọn tất cả các tuyến bay và sử dụng Export Map to Google Earth để xuất các tuyến bay thành định dạng kml. Điền thông số 500 mét cho Height Value |
Bước 7: Lưu từng tuyến bay đường tạo lập ở bước trên (Chọn tuyến bay\Save Place As) thành định dạng kml

4.2.2. Chuẩn bị kế hoạch bay trên Litchi (qua trình duyệt web)
Sau khi hoàn thành việc chuẩn bị kế hoạch bay với định dạng kml ở mục 4.2.1, các kế hoạch bay này sẽ được nhập vào Litchi trên web browser (khuyến nghị sử dụng Google Chrome) để có thể thiết lập đường bay hoàn chỉnh. Những kế hoạch này sẽ được lưu trữ tại cơ sở dữ liệu của Litchi và đồng bộ với máy tính bảng.
Bước 1: Mở Litchi trên Web Browser với liên kết: https://flylitchi.com/hub

Bước 2: Đăng nhập bằng tài khoản dùng trên máy tính bảng
Nếu chưa có tài khoản thì có thể tạo tài khoản miễn phí

 |
Bước 3: Chọn Settings và cài đặt lần lượt các thông số như sau:
Aircraft: Mavic/Phantom 3-4/Inspire 1-2 Units: Metric (đơn vị tính là m) Heading Mode: Custom (WD) Finish Action: RTH (trở về sau khi kết thúc) Path Mode: Straight Lines (bay thẳng) Cruising Speed: 54.0km/h Max Flight Speed: 54.0km/h Default Curve Size: 0% Default Gimbal Pitch Mode: Disable |
Bước 4: Import kế hoạch bay được tạo lập ở mục 4.2.1 và đánh dấu Add Take Photo Action

| Bước 5: Kiểm tra lại kế hoạch bay và lưu lại. Khi tạo lập nhiều kế hoạch bay, hãy nhớ rằng việc lưu liên tục sẽ bị lỗi khi một kế hoạch yêu cầu thời gian vài phút để đồng bộ máy chủ với tài khoản Litchi. |  |
Chương 5. Vận hành bay
Điều khiển thiết bị bay là một trong những chủ đề quan trọng nhất trong tài liệu hướng dẫn này để bảo đảm bay an toàn trong dài hạn và có được dữ liệu cần thiết để giám sát tài nguyên riêng. Trong chương này, các chủ đề nhỏ sau đây sẽ được trình bày:
5.1. Kiểm tra điều kiện thời tiết trước khi bay
5.2. Vận hành bay (chế độ lái chủ động)
5.3. Vận hành bay (chế độ lái tự động)
5.4. Các biện pháp ứng phó cho tình huống khẩn cấp
5.1. Kiểm tra điều kiện thời tiết trước khi bay
Các yếu tố thời tiết như gió, mưa, nhiệt độ, sương mù, … là những yếu tố sẽ trực tiếp ảnh hưởng đến an toàn bay cũng như hiệu quả của chuyến khảo sát. Vì vậy, người điều khiển cần kiểm tra các điều kiện thời tiết trước khi bay. Có một vài ứng dụng hỗ trợ người điều khiển thiết bị bay kiểm tra điều kiện thời tiết kịp thời và tài liệu hướng dẫn này đề xuất sử dụng ứng dụng “UAV Forecast” để kiểm tra các yếu tố nêu trên. UAV Forecast không chỉ cung cấp thông tin về thời tiết mà còn thông tin về những “khu vực cấm bay” (ví dụ như xung quanh sân bay, khu vực đông dân cư, v.v.).
 |
Các thông báo trên màn hình bao gồm:
Good To Fly: có thể thực hiện chuyến bay Weather: trạng thái thời tiết hiện tại Sun: thời gian mặt trời mọc và lặn Temperature: nhiệt độ tại điểm điều khiển Wind: tốc độ gió Gusts: gió mạnh/ bấ’t ngờ thổi trong thời gian rất ngắn Wind Dir.: hướng gió Precip Prob: xác suấ’t có mưa Cloud Cover: độ che phủ của mây Visibility: tầm nhìn xa Visible Sats: số vệ tinh Kp: Sự gián đoạn địa từ Sats Locked: số vệ tinh bị khoá |
Tập hợp thông tin nêu trên cho thấy có thể thực hiện chuyến bay tại thời điểm được kiểm tra. Và UAV forecast có các chức năng để cung cấp thêm thông tin như dự báo thời tiết trên các bộ chỉ báo nêu trên theo giờ cũng như điều kiện thời tiết (tốc độ gió, tốc độ gió mạnh và nhiệt độ) theo các cao độ nêu dưới đây.
Có thể thiết lập ngưỡng của mỗi thông số điều kiện thời tiết trong ứng dụng để người điều khiển có thể kiểm tra/cập nhật tình trạng cài đặt đúng cách và thường xuyên.
 |
Dự báo thời tiết trên bộ chỉ báo trong 24 giờ tiếp theo bao gồm
Time: các thời điểm trong ngày Gusts: Gió mạnh/ bấ’t ngờ thổi trong thời gian rất ngắn Temp (0C): Nhiệt độ không khí Precip: xác suấ’t có mưa Cloud Cover: mây che phủ Visibility (km): tầm nhìn xa Visible Sats: số vệ tinh Kp: Gián đoạn bởi địa từ Et. Sats Locked: số vệ tinh bị khoá Good To Fly: Đánh giá có/không thể thực hiện khảo sát theo các thời điểm Ghi chú: Vùng màu xanh là thời điểm thuận lợi cho khảo sát |
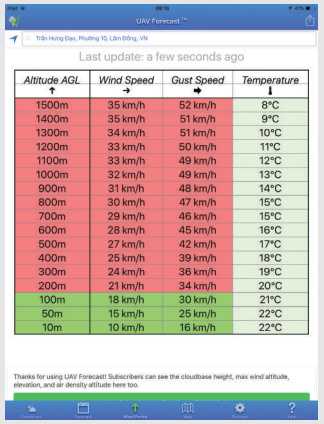
| Bảng kiểm tra độ cao bay tối ưu bao gồm:
Altitude AGL: Cấp chiều cao kiểm tra Wind Speed: Tốc độ gió theo độ cao Gust Speed: Tốc độ gió mạnh theo độ cao Temperature: Nhiệt độ theo độ cao Ghi chú: Vùng màu xanh là độ cao thuận lợi cho khảo sát |
 |
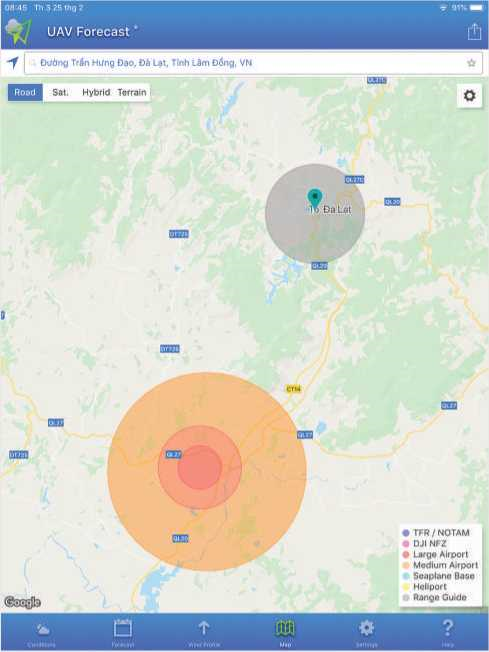 |
Các thông báo khu vực cấm bay bao gồm:
TFR/NOTAM: vùng giới hạn bay tạm thời DJI NFZ: vùng cấm bay từ DJI Large Airport: Vùng cấm bay của sân bay lớn Medium Airport: Vùng cấm bay của sân bay trung bình Seaplane Base: Vùng thuỷ phi cơ Heliport: Bãi đáp máy bay trực thăng Range Guide: phạm vi điều khiển Flycam Ghi chú: Bán kính của khu vực có thể điều chỉnh bằng cài đặt (cần phù hợp với quy định pháp lý đối với từng khu vực cấm bay |
5.2. Vận hành Flycam (Manual-Pilot – Chế độ lái chủ động)
Manual-Pilot là chế độ điều khiển Flycam chủ động sử dụng ứng dụng DJI GO 4 hoặc Litchi. Về cơ bản, hướng dẫn này khuyến cáo sử dụng chế độ lái tự động – Autopilot (xem mục 5.3) cho khảo sát; chỉ dùng chế độ lái chủ động này trong trường hợp i) tình huống khẩn cấp trong khi đang dùng chế độ auto-pilot và ii) cần ghi lại tình huống nhanh chóng bằng video hay ảnh riêng lẻ.
5.2.1. Giới thiệu về các chức năng của DJI Go 4
DJI Go 4 là ứng dụng mặc định được DJI phát triển để điều khiển thiết bị bay. Ứng dụng này cũng sử dụng để cân chỉnh trước khảo sát để có một chuyến bay an toàn, hiệu quả. Trong phần này của tài liệu hướng dẫn sẽ giới thiệu các chức năng của DJI Go 4.

 |
Giao diện thông tin của DJI Go 4
• Thông báo kết nối thiết bị • Cập nhật firmware và vùng giới hạn bay • Quản lý thông tin người sử dụng • Các tài liệu hướng dẫn |

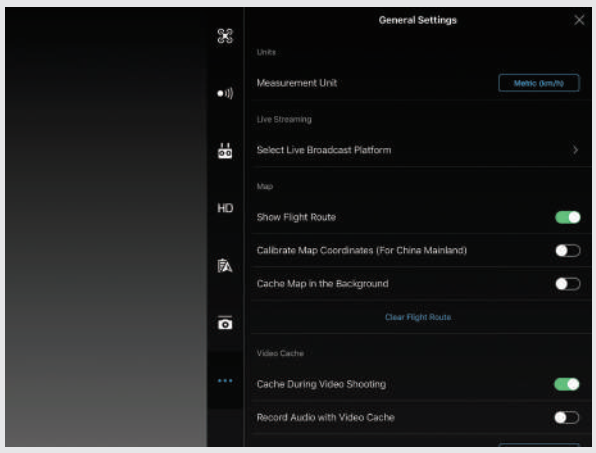 |
Cài đặt chung
• Cài đặt đơn vị tính • Cài đặt bản đồ và đường bay • Cài đặt hình ảnh chia sẻ • Cảnh báo tình trạng của thiết bị • Thông tin về firmware |
Cài đặt chính của người điều khiển:
|
 |
 |
Cài đặt điều hướng bằng cảm biến Các tùy chỉnh hướng: bảng cài đặt này được sử dụng để Flycam có thể tự động né tránh vật cản dựa trên cảm biến của máy (cần sử dụng chế độ bay P ở mục cài đặt chính của người điều khiển) |
Cài đặt điều khiển từ xa:
|
 |
 |
Cài đặt truyền hình ảnh
Cài đặt tần số: để đảm bảo thiết bị và điều khiển có thể kết nối được tốt nhất bao gồm 2 tần số 2,4Ghz và 5,8Ghz. Khuyến nghị chuyển tần số 5,8Ghz tại những khu vực dễ nhiễu sóng |
Pin máy bay
|
 |
 |
Cài đặt Gimbal
|
Cài đặt về hình ảnh:
|
 |
5.2.2. Các cân chỉnh trước khi khảo sát
Để đảm bảo có một chuyến khảo sát an toàn, người điều kiện cần thực hiện cân chỉnh thiết bị thông qua ứng dụng DJI Go 4. Phải cân chỉnh: cảm biến, la bàn, điều khiển và gimbal.
Bước 1: Đặt máy bay trên một bền mặt phẳng, rộng, thoáng và tránh các xa các đồ vật kim loại từ trường và tháo cánh quạt khỏi máy bay chính
Bước 2: Bật điều khiển, máy bay và khởi động DJI Go 4 trên máy tính bảng và chờ các thiết bị có kết nối ổn định
Bước 3: Thực hành cân chỉnh lần lượt các chức năng theo các bước sau;
Cảm biến: Chọn General Settings> Main Controller Settings> Advanced Settings> Sensors> IMU> Calibrate IMU. Xoay máy bay theo hình hướng dẫn trên màn hình. Sau khi hoàn thành, đặt máy bay về vị trí ban đầu và ấn Restart.
La bàn: Chọn General Settings> Main Controller Settings> Advanced Settings> Sensors> Compass> Calibrate Compass. Xoay máy bay theo hướng dẫn ở độ cao 1,5m.
Điều khiển (khuyến nghị: thực hiện Flycam không bay theo hướng của điều khiển): Chọn General Settings> Remote Controller Settings> Remote Controller Calibration> Calibrate. Lần lượt kéo 2 cần điều khiển và cần xoay Gimbal về các hướng.
Gimbal (khuyến nghị: Thực hiện khi Gimbal thu được hình ảnh bị lệch): General Settings> Gimbal Settings> Gimbal Auto Calibrate. Chờ cho máy bay tự động thực hiện cân chỉnh.
Các thao tác điều khiển Flycam chủ động
Vui lòng thực hiện theo hướng dẫn sau
Bước 1: Kiểm tra kết nối giữa bộ điều khiển, máy tính bảng và máy bay
 |
 |
| 1. Kết nối bằng cáp USB với điều khiển | 2. Quấn dây gọn gàng |
 |
 |
| 3. Đặt máy tính bảng trên đế gắn màn hình | 4. Kiểm tra kết nối với máy tính bảng |
Bước 2: Kiểm tra tình trạng pin và thông báo kết nối
 |
 |
| 1. Kiểm tra tình trạng pin: ấn 1 lần Khởi động điều khiển: ấn 0 lần và giữ
*Lưu ý: thực hiện các bước tương tự đối với pin Flycam. |
2. Khi có thông báo “Connected” nghĩa là Flycam đã sẵn sàng để điều khiển |
Bước 3: Các thao tác điều khiển: trong bài hướng dẫn này thực hiện với cài đặt mặc định của nhà sản xuất (mode – 2) và khuyến nghị người điều khiển không nên cài đặt sang chế độ điều khiển khác.
 |
 |
| Khởi động bằng cách kéo 2 cần điều khiển xuống vào phía bên trong | Đẩy nhẹ cần điều khiển phía bên trái lên trên để nâng độ cao Flycam
*Lưu ý: cần nâng Flycam đến độ cao an toàn, nơi không vật cản nào |
 |
 |
| Kéo cần điều khiển bên trái qua trái để điều hướng máy bay xoay sang bên trái | Kéo cần điều khiển bên trái qua phải để điều hướng máy bay xoay sang bên phải |
 |
 |
| Kéo cần điều khiển bên trái xuống để giảm dần hoặc hạ cánh
*Lưu ý: nếu hạ cánh thì giữ chặt cần cho đến khi máy bay tắt mô-tơ |
Ấn và giữ nút Trở về (RTH) khi Flycam cần trở về điểm xuất phát tự động
*Lưu ý: cần quan sát vật cản xung quanh/ kiểm tra trước cài đặt độ cao của chế độ RTH trong DJI Go 4 |
 |
 |
| Đẩy cần điều khiển bên phải lên trên để máy bay di chuyển tới | Kéo cần điều khiển bên phải xuống để máy bay di chuyển về sau |
 |
 |
| Đẩy cần điều khiển bên phải qua bên trái để máy bay di chuyển qua trái | Đẩy cần điều khiển bên phải qua bên phải để máy bay di chuyển qua phải |
*Lưu ý: đối với thao tác điều khiển máy bay di chuyển: hướng của điều khiển cần tương ứng với hướng của Flycam (hướng Gimbal) để tránh điều khiển sai
 |
 |
| Gặt nút điều khiển Gimbal để xoay của Gimbal hướng lên hoặc xuống
Ấn nút Record để chuyển và quay phim Gặt cài đặt camera để thu được số liệu tốt nhất |
• Ấn nút Shutter để chụp hình nhanh |
5.2.3. Vận hành Flycam (Auto-Pilot – Chế độ lái tự động)
Sau khi hành trình bay được thiết lập bằng các ứng dụng GIS và Litchi theo hướng dẫn Chương 4, các hành trình bay này sẽ được đồng bộ hoá đến máy chủ của Litchi và máy tính bảng.
Các bước tiến hành trên máy tính bảng như sau:
Bước 1: Kết nối aircraft với điều khiển và máy tính bảng.
Bước 2: Mở ứng dụng Litchi trên máy tính bảng, chuyển sang chế độ Waypoint và đăng nhập tài khoản(6) (tài khoản của Litchi đã được tạo lập ở mục 4.2.2) (Cần có internet để đăng nhập và đồng bộ tài khoản)

Bước 3: Mở đường bay, và chọn tuyến bay cần khảo sát

Bước 4: Cài đặt và kiểm tra các thông số kỹ thuật cần thiết
- Heading: Custom
- Finish Action: RTH
- Path Mode: Straight Lines
- Cruising Speed: 54.0km/h
- Max Flight Speed: 54.0km/h
- Default Curve Size: 0%
- Default Gimbal Pitch Mode: Disable
- Rotations Direction: Managed
- Attitude: 500m (kiểm tra cho từng điểm)

Bước 5: Chọn button Play ( ) để bắt đầu điều khiển bay tự động.
Các lưu ý:
- Chuyển từ chế độ quay phim sang chế độ chụp hình (nếu cần thiết)
- Quay Gimbal hướng xuống mặt đất khi hành trình được thực hiện.
- Luôn quan sát màn hình điều khiển để xử lý tình huống khi cần thiết.
- Trong quá trình bay, thỉnh thoảng Flycam sẽ bỏ qua điểm chụp, trong trường hợp này người điều khiển cần chủ động bổ sung điểm chụp
- Nên sử dụng Format thẻ nhớ trước khảo sát (01 lần duy nhất trước hành trình bay đầu tiên)
- Nên sử dụng chức năng Clear Cache (không Format thẻ) của DJI Go 4 sau khi kết thúc mỗi hành trình bay
5.4. Các biện pháp ứng phó cho tình huống khẩn cấp
Mục này hướng dẫn độc giả cách xử lý tình huống khẩn cấp trong quá trình điều khiển Flycam để tránh hoặc giảm nhẹ hư hỏng nặng, tai nạn hoặc chất lượng dữ liệu thu thập kém.
| Tình huống khẩn cấp | Biện pháp/Hành động cần thực hiện |
| Trời mưa/
Sương mù |
Phantom 4 pro không phải là sản phẩm chống nước, vì vậy khi trời mưa hoặc sương mù dày đặc trong khi điều khiển bay, cần thực hiện các biện pháp sau;
|
| Nhiễu từ trường | Do ảnh hưởng của đường điện cao thế/ thiết bị điện tử khác có từ trường mạnh, Flycam có thể không thể cất cánh và/ hoặc điều khiển;
|
| Gió lớn | Gió lớn: Trong điều kiện có gió lớn, mặc dù Phantom 4 Pro là thiết bị bay có tính ổn định cao, ít gặp tai nạn vì yếu tố gió to, nhưng vẫn cần thực hiện các biện pháp sau;
Trước khi bay
Trong khi bay
|
| Tín hiệu yếu | Trước khi bay
|
| Bị vướng vào cành cây, chướng ngại | Trước khi bay
|
Chương 6. Xử lý dữ liệu
6.1. Pix4Dmapper
Pix4Dmapper(7) là một phần mềm quan trắc dùng để dựng bản đồ bằng Flycam, sử dụng hình ảnh do Flycam chụp. Nó có thể tạo ra nhiều loại bản đồ 2D và mô hình 3D theo tham chiếu địa lý, bao gồm cả các mô hình bề mặt và địa hình kỹ thuật số, bản đồ trực giao, bản đồ chỉ mục (ví dụ: NDVI, NDRE), vân vân… Với camera chuyên dụng bổ sung như camera đa phổ hoặc nhiệt, phạm vi sử dụng dữ liệu được mở rộng đáng kể (ví dụ như theo dõi sự tăng trưởng của cây trồng, cháy rừng, v.v.)
Dự án SNRM đã mua bản quyền sử dụng vĩnh viễn và hai chiếc máy tính xách tay, và bàn giao lần lượt cho BNBNPMB và DNWPFMB.
6.2. Xử lý dữ liệu
Yêu cầu dữ liệu cho việc xử lý của Pix4Dmapper như sau:
- Dữ liệu từ Flycam: khuyến nghị sử dụng chế độ auto-pilot để bảo đảm tỷ lệ phủ giữa các bức ảnh liền kề là 70 – 80%
- Máy tính xử lý dữ liệu: cấu hình tối thiểu là CPU Intel core i5 thế hệ thứ 6, RAM: 8GB; ổ cứng SSD và VGA rời (Geforce hoặc ATI)
- Kết nối internet: internet băng thông rộng, ổn định trong suốt quá trình xử lý của Pix4Dmapper
Bước 1: Mở ứng dụng Pix4D Desktop, đăng nhập tài khoản đã được cung cấp sau đó chọn Pix4Dmapper Pro

Bước 2: Trong giao diện chính của ứng dụng chọn “New Project” để xử lý ảnh mới

Bước 3: Trong giao diện New Project thực hiện nhập các thông tin như sau:
Name: nhập tên của dự án (đề xuất tên dễ nhận dạng cho tên khu vực và ngày tháng khảo sát)
Create In: vị trí lưu dự án
Project Type: chọn “New Project” để tạo dự án mới hoặc chọn “Project Merged from Existing Projects” để nối/kết hợp với dữ liệu hiện tại.
Sau khi thực hiện xong các bước trên, chọn “Next”

Bước 4: Trong giao diện tiếp theo của “New Project”, chọn hình ảnh cần xử lý như sau:
Add Image: chọn ảnh cần xử lý
Add Directories: chọn thư mục chứa ảnh
Remove Selected: để xóa 1 hay nhiều ảnh đã chọn (nếu cần)
Clear List: để xóa toàn bộ các ảnh đã chọn (nếu cần)
Sau khi chọn xong các ảnh, chọn “Next”

Bước 5: Sử dụng các thông số mặc định để xác định vị trí địa lý của ảnh (hệ quy chiếu của ảnh – không cần phải chỉnh sửa) như hình bên dưới và chọn “Next”

Giao diện tiếp theo (Chọn Hệ quy chiếu đầu ra), sử dụng thông số mặc định và chọn “Next”

Chọn “3D Maps”, đánh dấu chọn “Start Processing Now” và chọn “Finish”.

Các nội dung khác, hoặc bản gốc của tài liệu quý vị vui lòng xem thêm trong bản gốc của JICA/SNRM tại đây.
Hi vọng hướng dẫn sử dụng flycam phục vụ theo dõi giám sát rừng sẽ giúp ích cho quý vị trong các hoạt động chuyên môn. Mọi thông tin chi tiết quý vị có thể liên hệ với Dự án để biết thêm chi tiết.
hướng dẫn sử dụng flycam trong lâm nghiệp
hướng dẫn sử dụng flycam theo dõi, giám sát rừng
hướng dẫn sử dụng flycam phục vụ theo dõi giám sát rừng
hướng dẫn sử dụng flycam chỉ đạo chữa cháy rừng
hướng dẫn sử dụng flycam của JICA
hướng dẫn sử dụng flycam của dự án SNRM
hướng dẫn sử dụng flycam phantom 4
hướng dẫn sử dụng flycam bay chụp cơ bản
hướng dẫn sử dụng flycam và các phần mềm liên quan
hướng dẫn sử dụng flycam phát hiện mất rừng
hướng dẫn sử dụng flycam giám sát rừng
hướng dẫn sử dụng flycam tuần tra rừng
hướng dẫn sử dụng flycam tiếng việt
hướng dẫn sử dụng flycam cho người mới bắt đầu
hướng dẫn sử dụng flycam căn bản
hướng dẫn sử dụng flycam dji
hướng dẫn sử dụng flycam bay chụp đất rừng
hướng dẫn sử dụng flycam giám sát đa dạng sinh học
hướng dẫn sử dụng flycam phát hiện phá rừng
hướng dẫn sử dụng flycam
hướng dẫn sử dụng flycam
hướng dẫn sử dụng flycam
hướng dẫn sử dụng flycam
hướng dẫn sử dụng flycam